Az iterációvezérlés alkalmazása #
Míg a növekmény függvény a számítás kritikus szakaszában a tehernövekmények mértékét kontrolálja, addig az iteráció vezérlés az alakváltozás növekmények mértékét szabályozza iterációs lépésenként. Két típusa van.
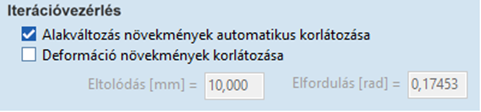
,,Alakváltozás növekmények automatikus korlátozása’’ #
Az iteráció vezérlés egyik típusa az ,,Alakváltozás növekmények automatikus korlátozása’’, amely a kritikus nemlineáris karakterisztikával rendelkező elemek alakváltozásait figyeli. Ha az alakváltozás állapot áthalad az erő-alakváltozás diagram kritikus szakaszán, lecsökkenti az alakváltozás növekményt az aktuális iteráción belül.

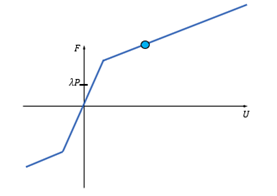
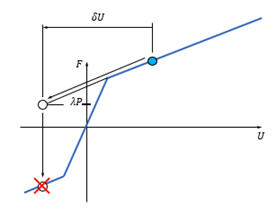
Erre az esetre mutat példát egy határerővel rendelkező elem. Tételezzük fel, hogy az elem deformációja az előző iteráció során túllépte a határértéket. Ezt mutatja a világoskék karika. Ekkor nagyobb igénybevétel keletkezik, mint ami az erőegyensúlyhoz szükséges a lambda*P teherszinten.
Emiatt a megoldó az aktuális érintő merevséggel egy delta-U elmozdulást számol, hogy csökkentse az igénybevételt. Ez olyan hosszú, hogy az állapotjelző pont átkerül a jelleggörbe másik határerős szakaszára.
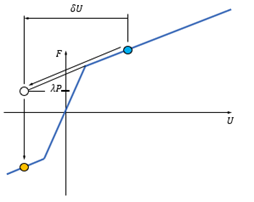
A következő iteráció során a megoldó megint megpróbálja megkeresni az erőegyensúlyt és az állapotjelző pont megint átkerül a másik határerős szakaszra. Így egy végtelen iterációs ciklus alakul ki, amely nem konvergáló növekményt eredményez.
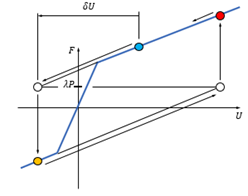
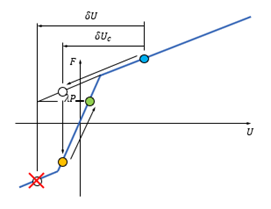
Az ,,Alakváltozás növekmények automatikus korlátozása’’ funkció bekapcsolt állapotában, a megoldó felismeri azt az esetet, amikor az állapotjelző pont több, változó érintőjű szakaszon halad keresztül.
Ebben az esetben az elmozdulás növekményt egy meghatározott, delta-Uc-vel jelölt értékre csökkenti.
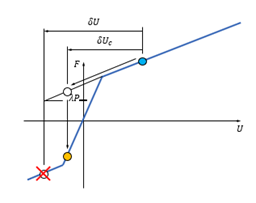
Az állapotjelző pontnak ez a fajta áthelyezése segít megtalálni az erő egyensúlyt és megszakítani végtelen ciklust.
E funkció fejlesztés alatt áll, hogy összetettebb eseteket is felismerjen.
,, Deformáció növekmények korlátozása’’’’ #
Az iteráció vezérlés másik típusa a ,,Deformáció növekmények korlátozása’’. Ennek alapja a legnagyobb alakváltozás komponensre meghatározott határérték. A túl nagy elmozdulás vektort (delta-U) úgy csökkenti delta-Uc-re, hogy annak legnagyobb komponense éppen a határértékkel egyezzen meg. Ezzel a korlátozással a végtelen, alternáló iterációs ciklusok elkerülhetőek. Az alkalmazott kis deformáció növekmények miatt azonban az iterációs folyamat nagyon hosszúra nyúlhat. Az eljárás lassú, de biztos konvergenciát eredményez.

A funkció alkalmazására egy praktikus példa egy egyszerű, imperfekcióval terhelt, húzott pótátlós szerkezet. A függőleges terhek hatására mindkét rácsrúd nyomottá válik az első iterációs lépésben. A valóságban a szerkezet ferde elmozdulásával egyensúlyi állapot alakulna ki. Ezzel szemben a megoldóprogramban túlzott deformációk lépnek fel, és a merevség elvesztése miatt a numerikus modell szétesik. Azonban a manuális korlátozás bekapcsolásával az elmozdulások kicsik maradnak, és a numerikus modell is képes elérni az egyensúlyi állapotot.

A felhasználói kérdések esetén gyakran használjuk ezt a funkciót a nyomozás során. Azon helyzetek megtalálása és megfigyelése, amikor a módszer megoldja a konvergencia problémát nagyban hozzájárul az automatikus korlátozás módszerének fejlesztéséhez.
