Habár a nemlineáris számítás a különböző típusú analíziseknek egy széles palettáját öleli fel, ez a cikk kifejezetten az erő vezérelt nemlineáris számításra fekteti a hangsúlyt. Különböző magyarázó ábrákkal tettük szemléletesebbé a számítás elméleti hátterét bemutató sorainkat. Elöljáróban, az AxisVM a Newton-Raphson iterációs eljárással oldja meg a nemlineáris problémákat.
Newton-Raphson iteráció egyszabadságfokú (SDOF – Single Degree Of Freedom) rendszerekre #
Az egyszabadságfokú nemlineáris rendszerek matematikai modellje egy nemlineáris algebrai egyenlet. Ez az egyenlet a modellben szereplő tetszőleges elmozdulás és az erre adott erő-válasz összefüggését írja le. Egy egyszerűsített csavarozott kapcsolat megfelelő mechanikai példa erre.
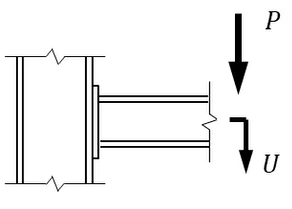
Egy adott P teherhez tartozó elmozdulást szeretnénk meghatározni a Newton-Raphson numerikus módszerrel. Ez az eljárás 2 lépést tartalmaz.
Először a terhelési folyamat teherlépcsőkre osztása történik meg.
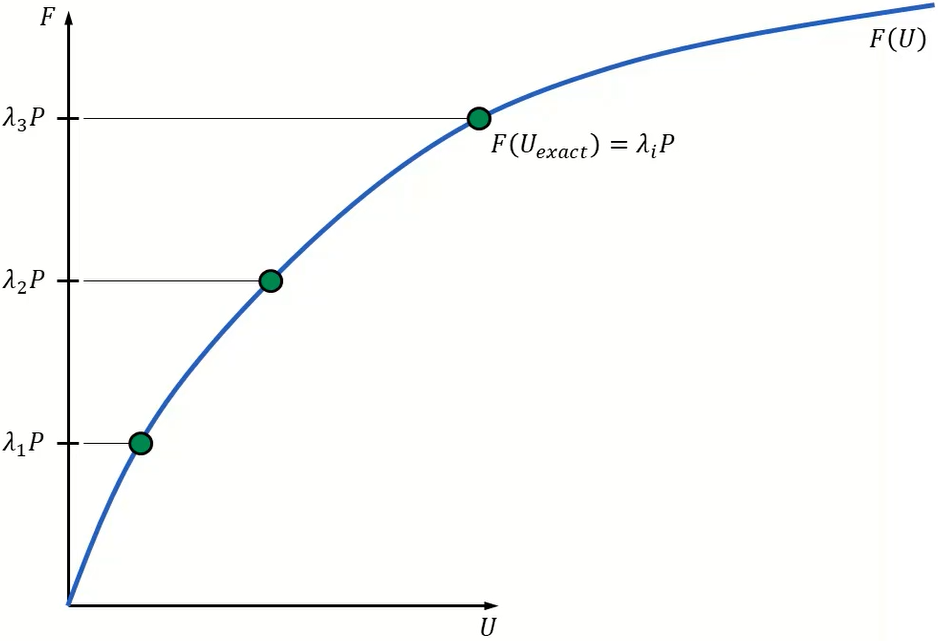
Ezt követően, egy iterációs eljárás megpróbálja megtalálni az utat a legutóbbi teherszint egyensúlyi helyzetétől a következő teherlépcsőhöz tartozó egyensúlyig.
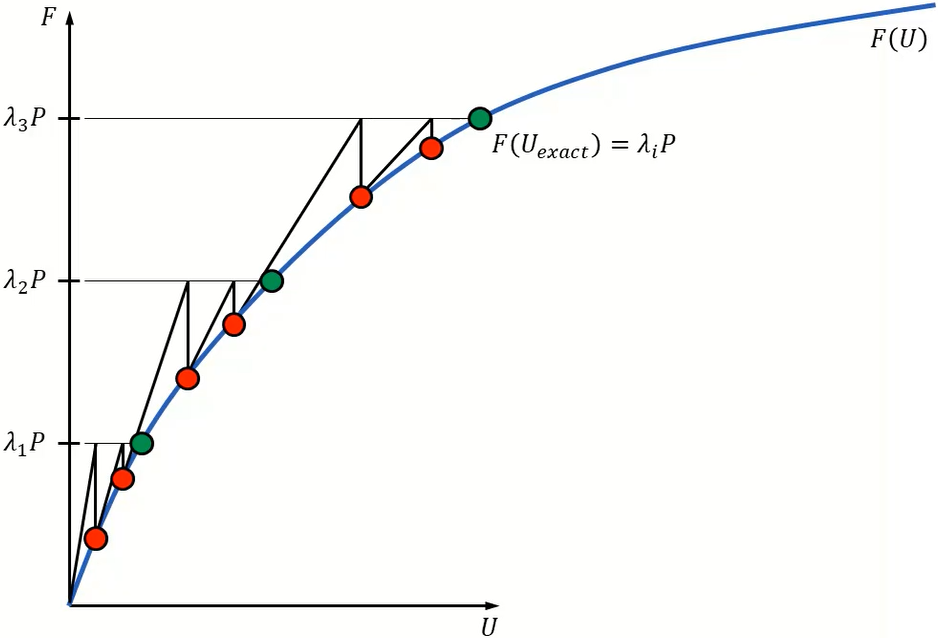
Az egyes teherszintekhez tartozó pontos megoldások zöld karikákkal lettek jelölve, míg a piros karikák az iteráció próbapontjait jelölik. Az iteráció során a nemlineáris függvényt az érintőjével közelítjük.

Az itt látható egyenletek egy iterációs lépést írnak le. A pontos megoldást csak közelíteni lehetséges. Annak eldöntésére, hogy a próba pont kellően közel esik-e a pontos megoldáshoz, előre meghatározott konvergenciakritériumok teljesülését vizsgálja a program.
Newton-Raphson iteráció többszabadságfokú (MDOF – Multiple Degree of Freedom) rendszerekre #
Lássuk a többszabadságokú rendszerek esetét. Egy egyszerű megoldás vektoriális változókra áttérni egy egyenletrendszer alkalmazásával. Azonban ezen megközelítés velejárója lenne egy 4-dimenziós függvénygrafikon, amely képes megjeleníteni a 2 elmozdulás, illetve 2 erő-válasz komponenst egy kétszabadságfokú rendszerben.

Ennek szemléltetésére egy kerülőmegoldással élünk.

A következőkben bemutatjuk a potenciális energia függvényét. Ez egy skalár-értékekkel leírt görbe az elmozdulások mint állapotváltozók függvényében. Ez a függvény differenciális kapcsolatban áll az egyensúlyi egyenletekkel. A különböző teherparaméterekhez különböző potenciál függvények rendelhetők. Továbbá, az egyensúlyi állapot jelentette megoldás a különböző teherszinteken mindig a teherszinthez tartozó potenciális energia függvény minimuma.
A korábbiakban látott szemléltetést követve, a mellékelt ábrán ismét zöld karikák jelzik a megoldásokat, azaz a minimumokat, míg piros karikák jelzik az iteráció során felvett próbapontokat. Természetesen minden pont az adott teherszinthez rendelhető potenciál függvény görbéjére illeszkedik. Amiért fontos volt a potenciális energia függvényének bemutatása, az az a tulajdonsága, hogy skalár-értékű marad többszabadságfokú rendszerek esetén is.
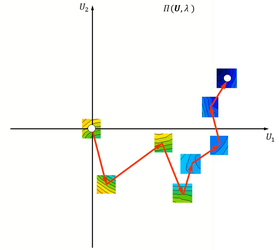
Ebből kifolyólag a kétszabadságfokú esetet megjeleníthetjük a következőképp: a potenciál függvényt kell ábrázolnunk 2D színezett szintfelületként a 2 elmozdulás komponens síkjában.

Ezen ábrázolás jól mutatja, hogy különböző képek tartoznak az egyes teherszintekhez és a megoldás mindig ezen felületek minimumpontja. Ezt megint csak zöld karikával jelöltük, míg piros karikák jelzik továbbra is az iteráció során felvett próbapontokat. Minden ilyen pont eleme ezen szintfelületnek. Összehasonlítva ezeket az ábrákat az egyszabadságfokú rendszer görbéjével, jól látható, hogy az iterációs folyamat közel sem olyan egyszerű, mint egy szabadságfok esetén. Láthatóan inkább egy bonyolult útkeresésnek tűnik egy komplex felületen, mintsem egy folyamatosan javuló közelítésnek. El lehet képzelni ugyanezt a folyamatot pl. 10.000 vagy 100.000 szabadságfok esetén…
Vessünk közelebbről pillantást egy ilyen felületre. Egy nagy modell esetén, amely sok nemlineáris elemet tartalmaz, a potenciális energia függvényhez tartozó hipersík nagyon összetett geometriát ölthet. Számos esetben, egynél több stabil vagy instabil megoldási pont létezik. Ráadásul, a megoldás vezérlő nem is látja az egész felszínt egyszerre. A számítás diszkrét próbapontokban történik, a számító ezen diszkrét pontokban találja meg az erő-választ és az ehhez tartozó érintőmerevséget. Ezek alapján történik az iteráció, ezen információk birtokában dönt a program, hogy a következő próbapontot merre keresse.
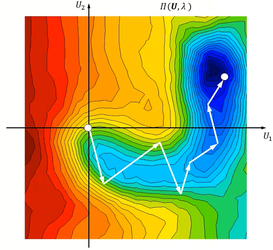
A mellékelt kép kellően szemléletes felvilágosítást ad arról, miért is annyira nehéz egy nemlineáris számítást konvergenciára bírni. Szem előtt tartandó az a tény, hogy a megoldás vezérlő nem látja a teljes szintfelületet, és nem tudja eldönteni, hogy az adott próbapont kellően közel esik-e a pontos megoldáshoz vagy sem. Pusztán bizonyos konvergenciakritériumok teljesülése esetén tud következtetést levonni.